


A simulator, which trains robots, must first be trained by the robot that it is required to train.
While this seems like a conundrum, a Queensland University of Technology PhD researcher is solving it using motion capture technology to enhance robotic performance.
According to a recent press release, the PhD researcher’s work is in the realm of ‘sim2real’, which aims to overcome a phenomenon called the ‘reality gap’.
Reality gap explained
Reality gap may be better explained through an example. For instance, a robot in simulation is taught how to pour drinks into glasses.
In simulation, the robot may be able to perform the task 100% of the time. However, when this behaviour is transferred to a real robot, it may only be successful 70% of the time.
This means that the real robot, upon learning the new skill, does not perform the skill as successfully as when in the simulator.
Improving real-world performance
The PhD researcher is looking at how the real-world performance of the robot can be improved so that it can be comparable to that of the simulator.
He is being supervised by researchers from the University as well as a researcher from CSIRO’s Data61, the data and digital specialist arm of Australia’s national science agency.
According to the PhD researcher, they are trying to quantify the difference between the simulators and real-world using motion capture.
This information can be used to improve the areas where simulators fail.
How is it done?
He records a robot doing tasks in the real world and then investigates how to mirror this in simulators.
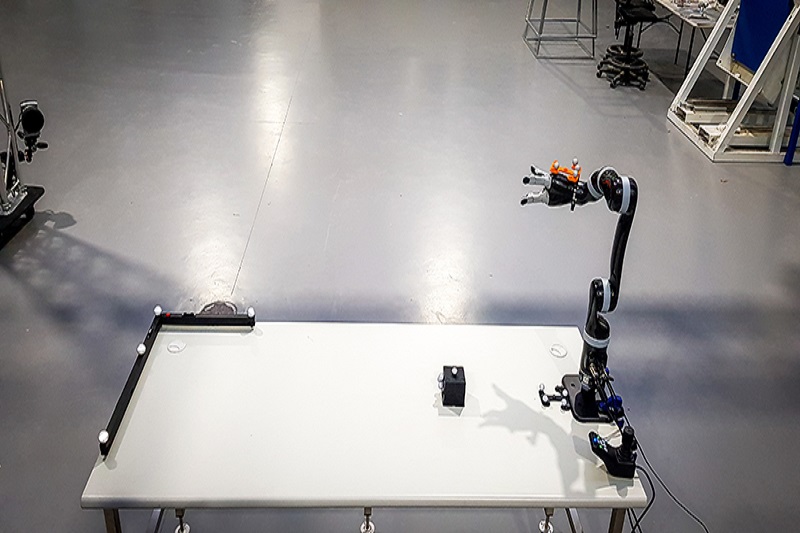
The Kinova Mico2, which is a robot arm with six joints and three-fingered gripper equipped with a Robotiq FT300 force sensor, is used to perceive when it pushes on something.
The arm is used in research and in assistive applications because of a plethora of reasons. These are:
- Comparatively cheap
- Lightweight
- Operates using mains power
- Safe for interaction with people
The motion capture is used as a real-world ground truth, which they compare to the simulation.
Reflective markers, which are placed on the arm, track the movement of those markers in 3D space to a precision of less than one millimetre.
They record the robot as it performs a range of tasks such as movements of the arm, the arm interacting with objects, and the arm picking up and stacking objects.
After which, the exact same movements are done in simulation as they try to tune the simulator to mirror what they witnessed in the real world.
Overcoming the reality gap and teaching robots in simulation, rather than the in real world, have several benefits. These are:
- Teaching robots in simulation is safer
- It avoids breaking or damaging real robots
- Running simulations is faster than the real-world
- Robots, which they normally do not have access to in the real world, can be used in a simulation












