In the realm where reality intersects with science fiction, pioneering research is being conducted by Dr Fu Zhang, an Assistant Professor in the Department of Mechanical Engineering at the Faculty of Engineering, the University of Hong Kong (HKU).
Under his guidance, an innovative endeavour has materialised: the development of a Powered-flying Ultra-underactuated LiDAR-Sensing Aerial Robot (PULSAR), a revolutionary creation poised to redefine the domain of unmanned aerial vehicles (UAVs).
A growing significance is being attributed to unmanned aerial vehicles (UAVs) in diverse fields such as search and rescue operations, cave surveying, and architectural mapping. The advent of the Powered-flying Ultra-underactuated LiDAR-Sensing Aerial Robot (PULSAR), developed by Dr Fu Zhang, Assistant Professor of the Department of Mechanical Engineering at the Faculty of Engineering, the University of Hong Kong (HKU), signifies a paradigm shift in UAV technology.
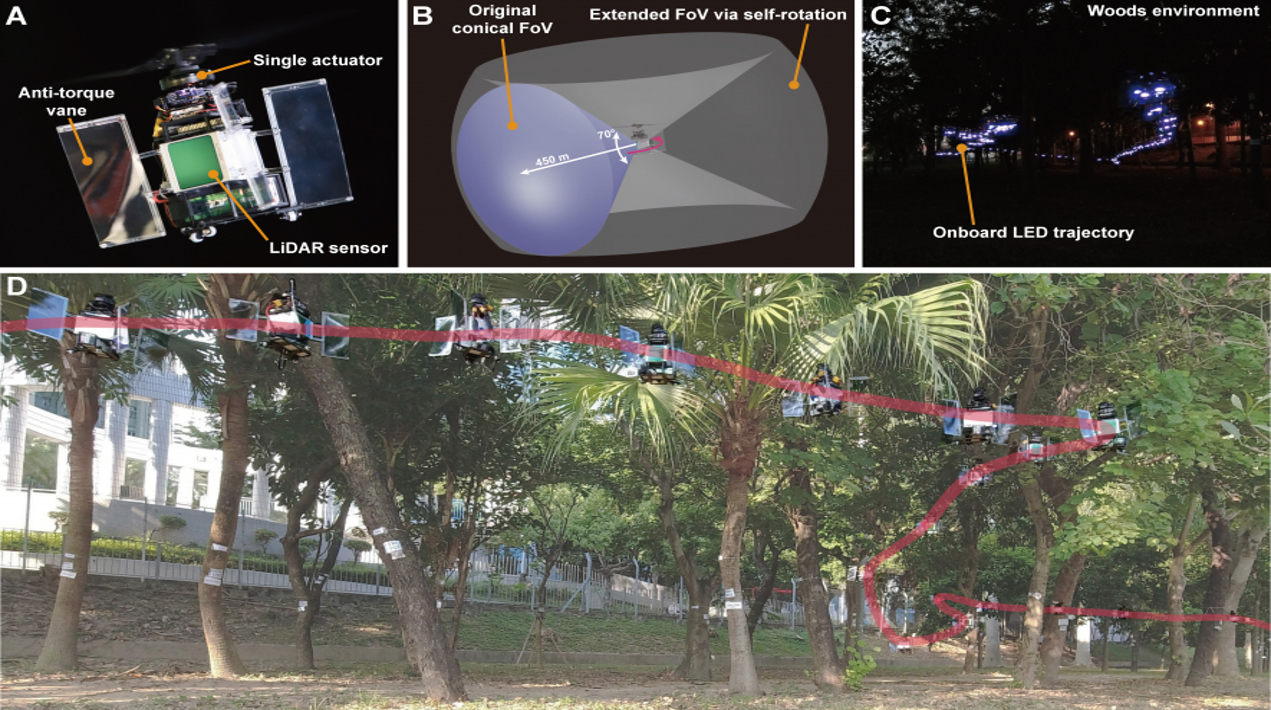
Named after the rotational and scanning characteristics resembling those of astronomical pulsars, PULSAR transcends existing capabilities. Equipped with a micro-computer and a LiDAR sensor, PULSAR demonstrates comprehensive onboard perception, mapping, planning, and control functionalities, effectively operating in both indoor and outdoor environments, independent of any external instrumentation.
The remarkable functionality of PULSAR is attributed to its utilisation of a single actuator, which facilitates the operation of the swashplateless mechanism and simultaneously generates both thrust and moment. Through a series of meticulously conducted experiments, Dr Zhang’s research team successfully showcased PULSAR’s real-time detection of static and dynamic obstacles, its ability to track intricate trajectories, and its capacity for autonomous navigation, even in conditions of complete darkness.
In addition, PULSAR exhibits exceptional resilience in the face of external wind disturbances, thereby ensuring safer and more stable flights in unpredictable environments. Remarkably, PULSAR can maintain its hover position within a confined area even when confronted with wind speeds of up to 4.5 m/s. This characteristic engender enhanced safety and stability during flights conducted within challenging and dynamic environments.
In addition to its previously mentioned capabilities, PULSAR incorporates a sensor that can effectively expand the field of view (FoV) through self-rotational motion, thereby enhancing the UAV’s perception and task efficiency. Presently, there exist two primary approaches for extending the FoV of a sensor, both of which are associated with substantial power consumption.
The first approach entails using sensors with large FoVs, such as fisheye cameras, catadioptric cameras, or 360° LiDAR systems. However, these sensors often introduce distortions into the captured data, and while 360° LiDAR offers a wide horizontal FoV, it typically possesses a limited and low-resolution FoV in the vertical direction. The second approach involves the use of multiple sensors, such as a multi-camera or multi-LiDAR system. Nonetheless, this approach incurs additional costs and leads to lengthier data processing times.
The introduction of PULSAR brings forth a significant advancement in energy efficiency, resulting in a remarkable 26.7% reduction in energy consumption when compared to a quadrotor UAV possessing equivalent propeller disk area and payload. This achievement is accompanied by the maintenance of agile performance.
The use of a single actuator propulsion system in PULSAR minimises energy conversion losses, consequently ensuring a high flight efficiency rating of 6.65g/W. Despite its compact dimensions, with a diameter of merely 37.6 cm and a battery capacity of only 41 Wh, this 1234-g UAV exhibits an impressive hover time of more than 12 minutes. By replacing the LiDAR sensor with a larger propeller and battery configuration, the hover time of PULSAR can be extended to exceed 40 minutes.
The research platform established by the team holds the potential to foster additional exploration in the field of self-rotating UAVs. He emphasised that the platform is expected to facilitate research on UAV control methods amidst high-speed rotation, as well as simultaneous localisation and mapping (SLAM) techniques under conditions of aggressive motion.