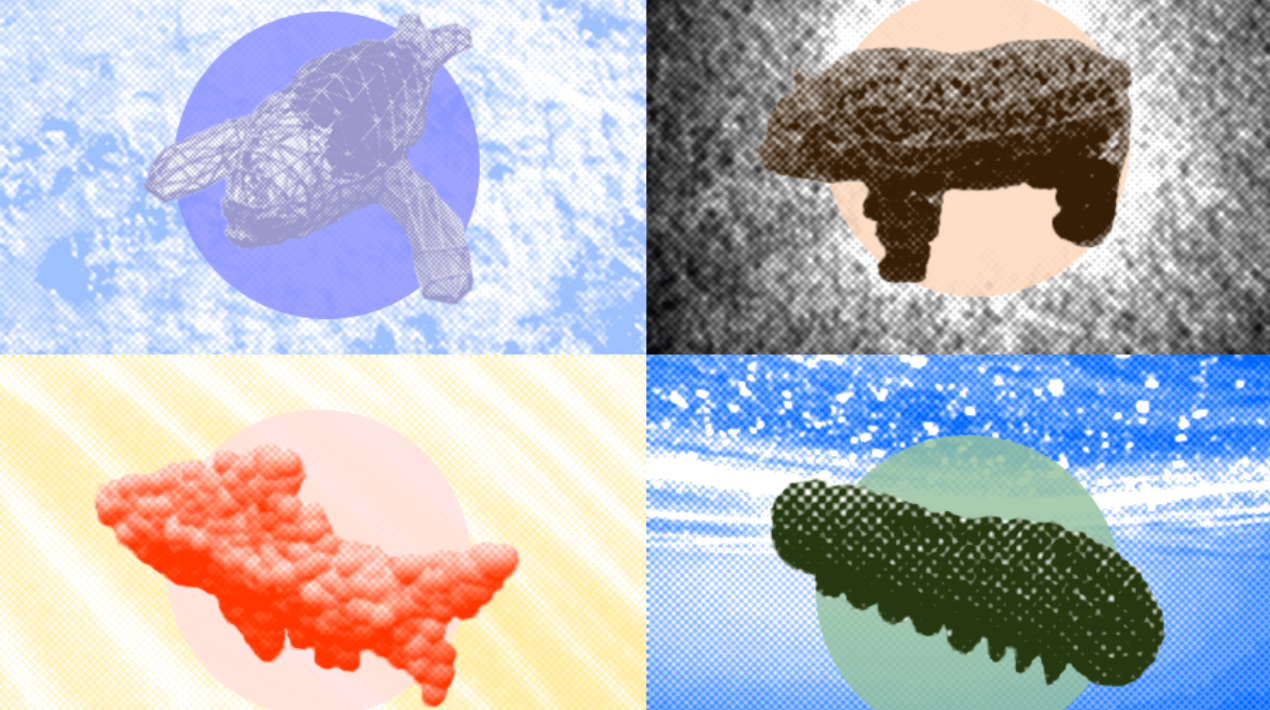
An MIT team has come up with a bio-inspired platform, SoftZoo. The open platform optimises algorithms used in robot design and helps designers choose the most efficient robot shape configuration. SoftZoo features panda bear, fish, shark and caterpillar models in three dimensions that can model soft robotics task execution.
In the past, robots struggled to move through active regions since their bodies could not adapt to their surroundings. The open-source simulation facilitates the creation of real-world soft robots with better ease and flexibility and faster movement capabilities in various settings. SoftZoo claimed has a more comprehensive platform than others to simulate design and control since it models movement that reacts to the physical properties of diverse biomes.
The platform can be used as a template for recreating soft robotics capabilities like locomotion, agile turning, and path following in different settings. These biological contours have the potential to inspire the creation of artificial life that is more specialised and terrain specific.
As an example, Tsun-Hsuan Wang, the Lead Researcher on the project and a PhD student at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) explained, “The gently undulating geometry of a jellyfish enables it to efficiently travel across large bodies of water. This has inspired researchers to develop new breeds of soft robots and opened unlimited possibilities of what artificial creatures cultivated entirely.”
The framework can assist users in determining the optimal configuration for a robot’s shape, thereby facilitating the development of versatile soft robotics algorithms. SoftZoo showcases different designs and their corresponding performance trade-offs in different environments (such as snow, desert, clay, and water). To handle computational control and design challenges efficiently, the open platform uses a differentiated multiphysics engine to run fewer simulations.
“This computational approach to co-designing the soft robot bodies and their brains (their controllers) opens the door to rapidly creating customised machines that are designed for a specific task,” said Daniela Rus, one of the authors and Director of CSAILs.
Additionally, the robots’ utility in rescue operations and exploration would increase if they possessed higher behavioural and mechanical intelligence levels. Designers may co-optimise land-based and marine robots to be more intelligent and more specialised for tasks like search-and-rescue and exploration with the help of SoftZoo. For instance, if someone disappeared during a flood, a robot optimised using the methods described on the SotftZoo platform might be able to find them.
The system’s ability to simulate interactions with diverse terrain demonstrates the importance of morphology, the study of organisms’ shapes, sizes, and forms. The architecture might stand for robot field testing in unnatural settings before any robot is built.
It may be difficult, for instance, for a study team based in Boston’s urban plains to evaluate how a bear-like robot performs in a desert. Instead, engineers in soft robotics may use the 3-D models available in SoftZoo to simulate various designs and assess the navigational efficacy of the algorithms powering their robots. This would ultimately help researchers save both time and money.
However, realising these soft robot designs still need to be discovered due to the constraints of current fabrication methods. Currently, SoftZoo cannot quickly realise muscle models, spatially varying stiffness, and sensitisation with current fabrication techniques. To fully understand the challenges of leaping from virtual to actual robots, Wang believed more research is needed. Since the platform can be used to test robotic control, they are also considering future applications in human mechanics manipulation.